Evezor Robot Arm
Evezor's current generation of Robotic Arms

Make it, Build it, Scale it
Evezor's current generation of Robotic Arms
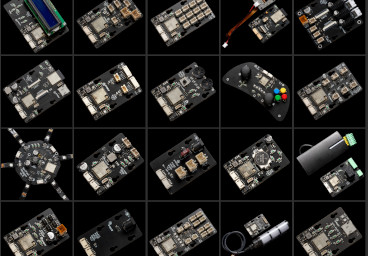
Create complex hardware projects with ease
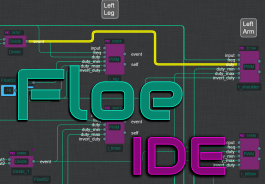
Floe Graphical Development Environment
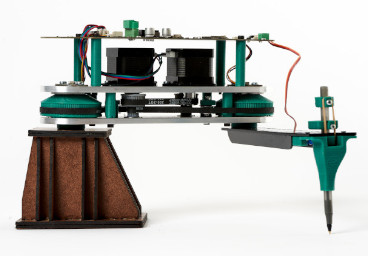
Evezor's Next Generation Robot Arm































We are launching many new products and releasing more source files as we do. Sign up to get the latest news!